|
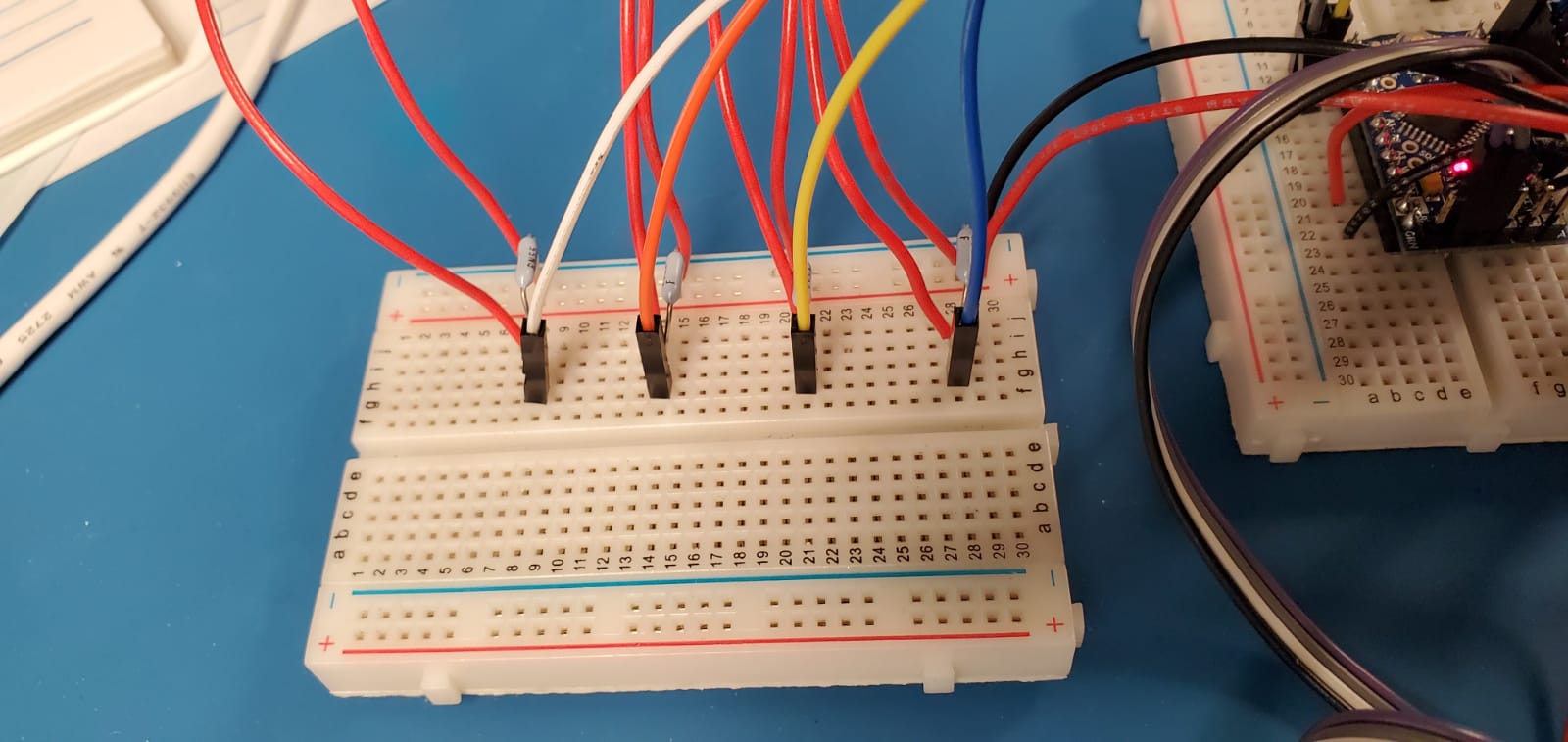
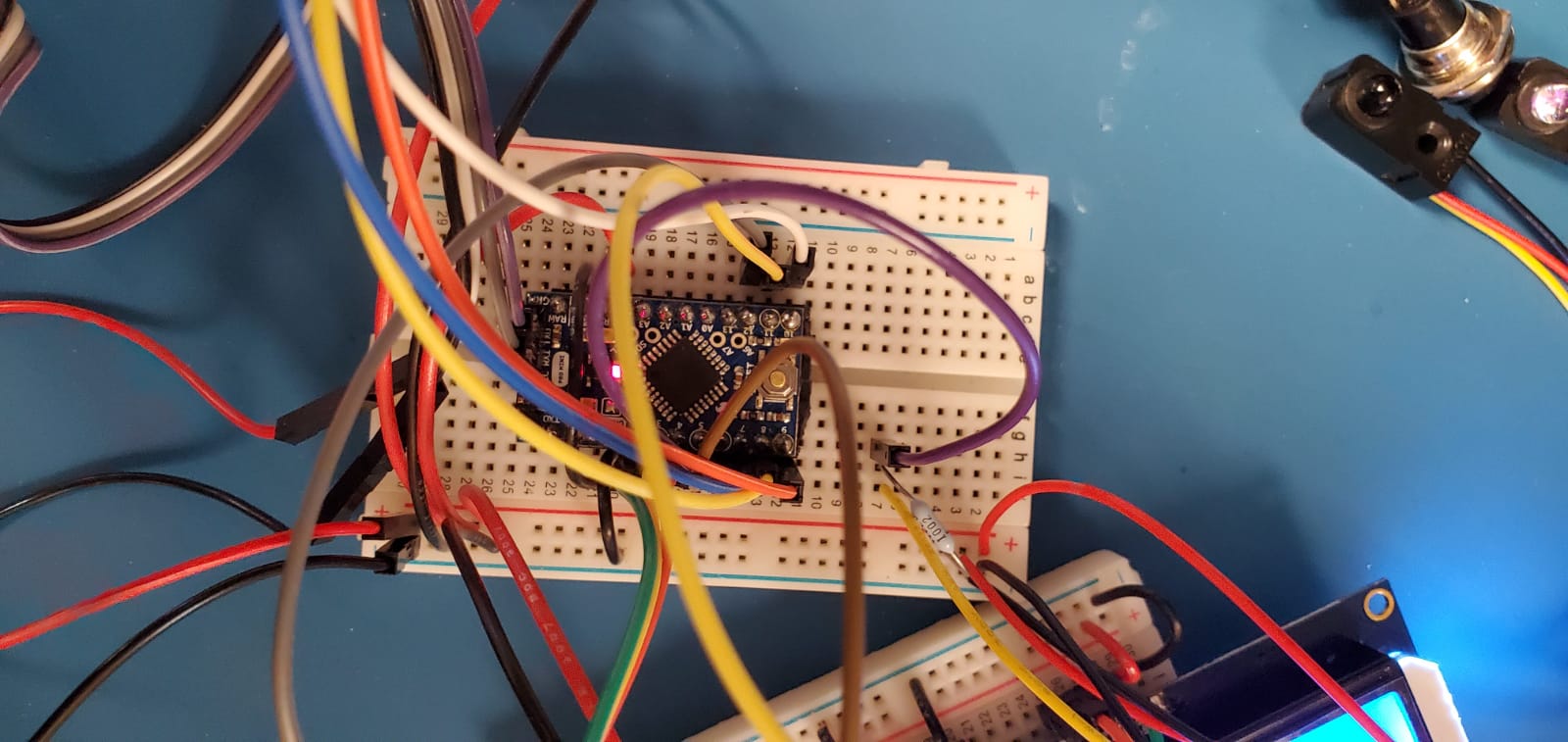
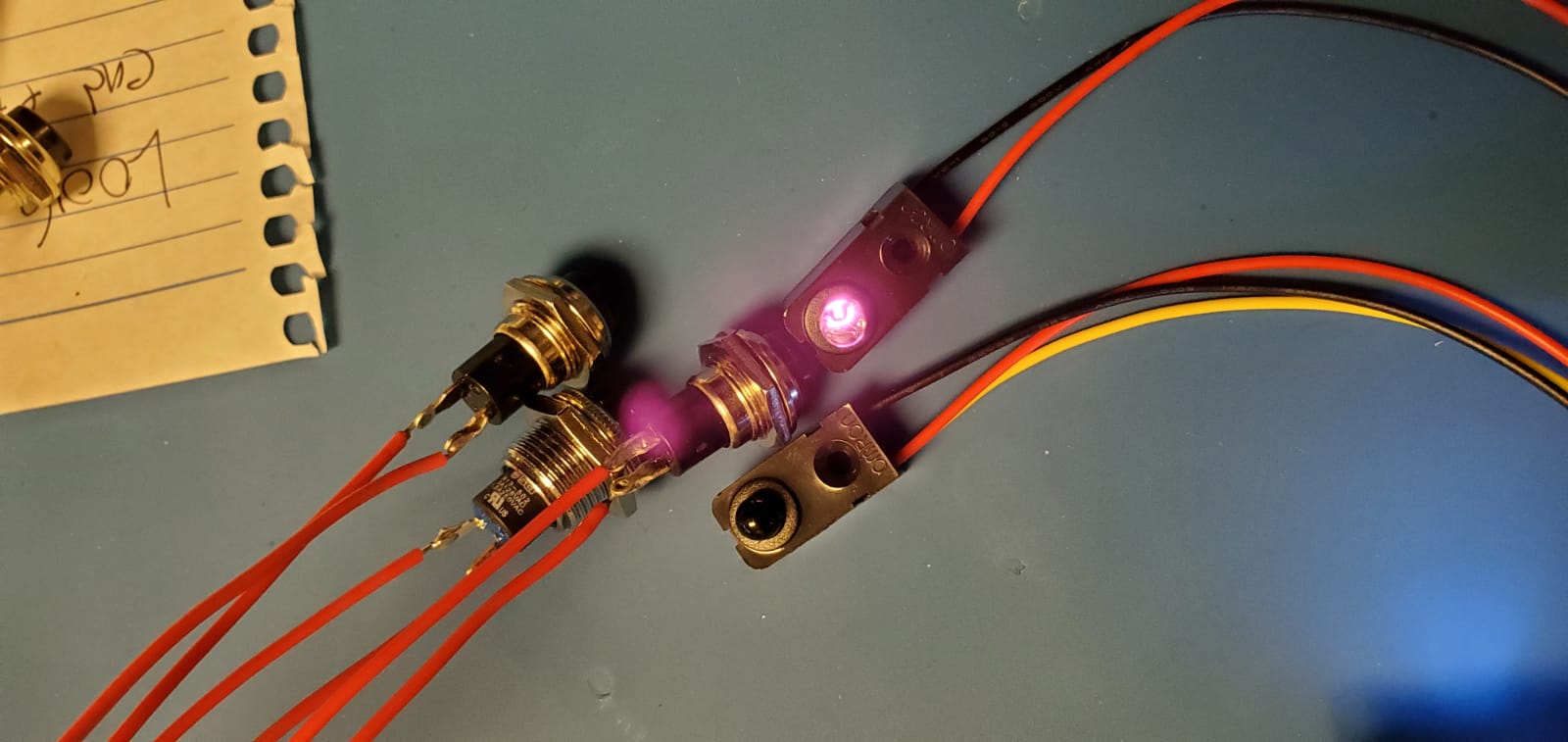
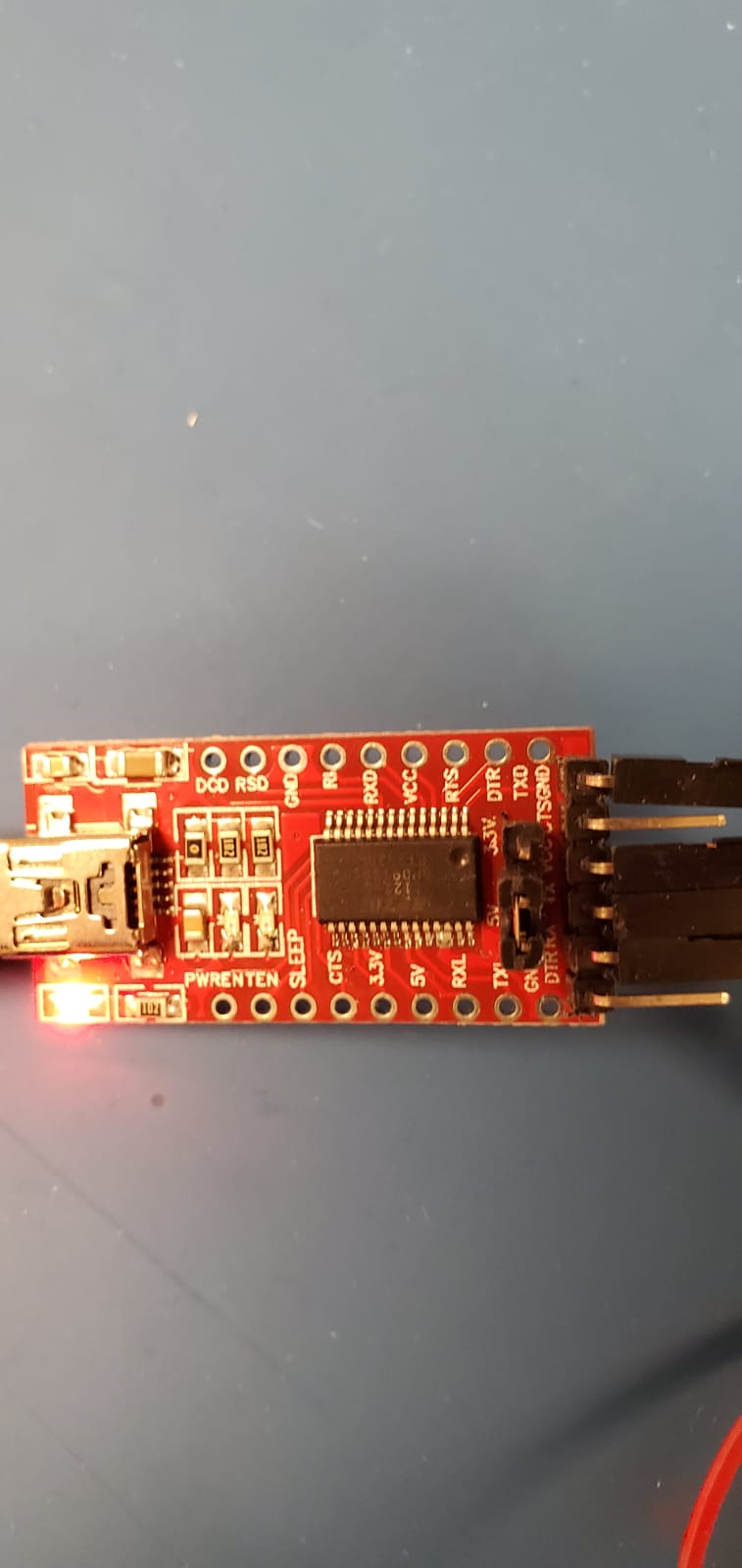
The following images will be explain with a power pint presentation and video of functionality, that I can't upload due work restrictions. This projects from work show how we evaluate algorithms and different repairs/methods for the mobility of robots, and the automatization of such tools.
0 Comments
|
DANIEL F DIAZ BAYONA