|
This project will meet the expectations for Objective 1, 3, and 6 I have learned a lot during this class, and in UAT. I for this project proposal, I want to show what I have learned, and applied to a real-life project. I want to be able to have a robotic car that can drive by itself without crashing. I want to apply what I learn about motors, encoders, PWM, and more. For this project I want to focus on a robotic car with an Ultrasonic Sensor (obstacle avoidance sensor) which by writing the proper code it will allow the Car to go in different direction without crashing. During this project we will apply the following concepts, sensors, and materials:
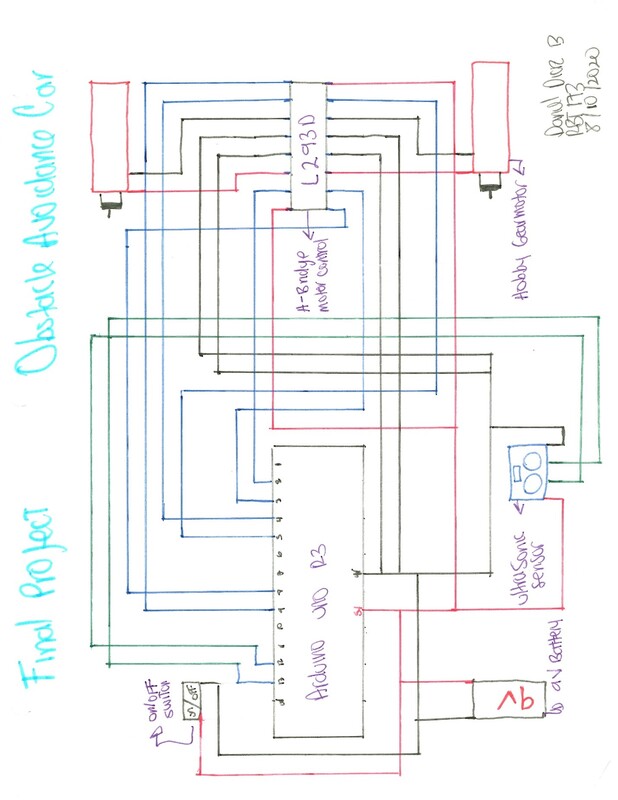
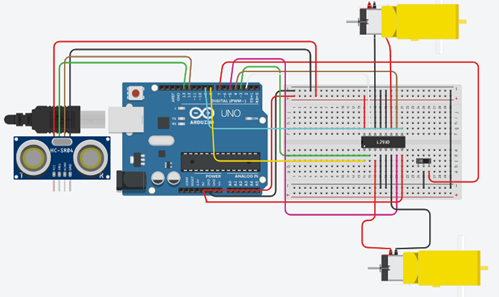
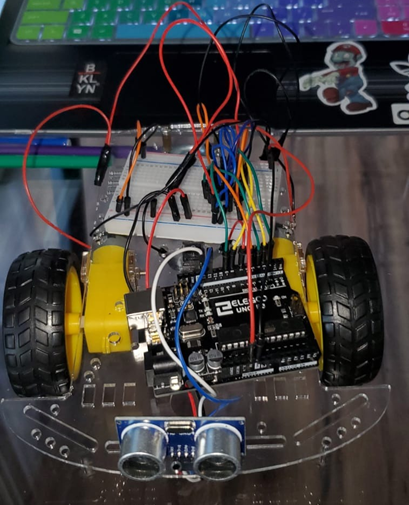
What this sensor does is that It works by sending out a burst of ultrasound and listening for the echo when it bounces off of an object. It pings the obstacles with ultrasound. An ultrasonic sensor is an electronic device that measures the distance of a target object by emitting ultrasonic sound waves and converts the reflected sound into an electrical signal. L293D The L293D is a 16-pin Motor Driver IC which can control a set of two DC motors simultaneously in any direction. The L293D is designed to provide bidirectional drive currents of up to 600 mA (per channel) at voltages from 4.5 V to 36 V (at pin 8!). You can use it to control small dc motors. PWM What is Pulse Width Modulation: It is a modulation technique where changing the width of the digital control signal, the power delivered to any load is controlled. Because of its precise control over the controlled parameter, low power loss and high efficiency this technique is used in a wide range of applications. Which for this project we will use the PWM to control the speed of the motor for the car. In other words, As its name suggests, pulse width modulation speed control works by driving the motor with a series of “ON-OFF” pulses and varying the duty cycle, the fraction of time that the output voltage is “ON” compared to when it is “OFF”, of the pulses while keeping the frequency constant. ON/OFF Switch What this switch does is basically what the name is. By using this sensor, we will turn off and turn on the Robotic car. Even when all the car is powered completely if the switch is in the off mode the car will not move. What went right I think I felt really good with the knowledge acquired during this semester and be able to apply for this project. One of the things that went right was having the TinkerCAD simulation done and working. What went wrong At the be beginning of the project I have a lot trouble loading the code into the Arduino board. As 7/29/2020 I have not be able to get the code into my Arduino. The ode complies fine, but when uploading the system crashes. Hopefully soon I will be able to load it, and have it working.
0 Comments
This project will meet the expectations for Objectives 1, 3, and 5 Materials
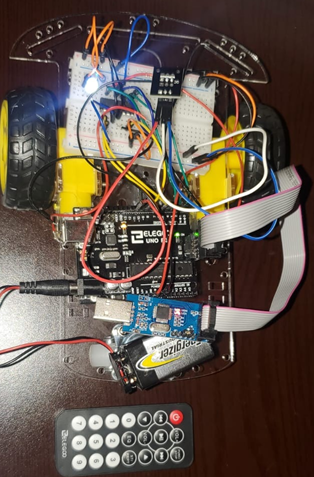
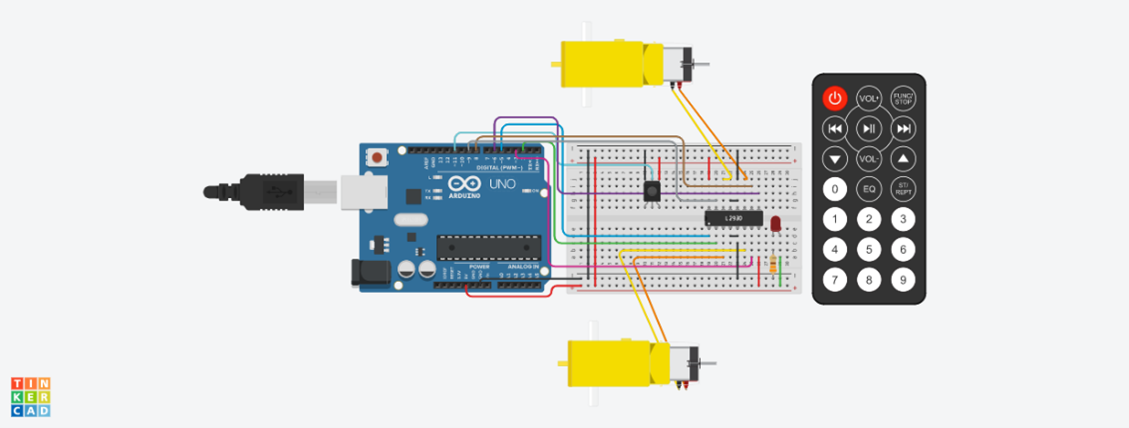
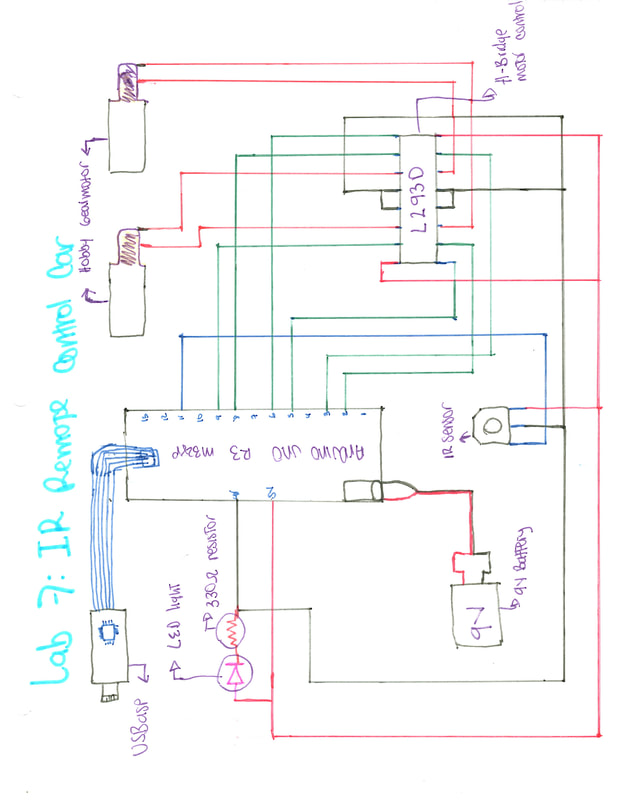
This program is simple. This program shows how the motor are rotating. The goal of this project/program/circuit it to control the speed of the motor by using PWM- Pulse-Width-Modulation. With this program we should be able to put the maximum speed of the motor and reduce the speed to it minimum by controlling the speed. This car will be able to turn Right, Left, go forward, and reverse. We going to do that by using a Remote controller via IR receiver. Then depending on the buttons pressed on the control the car will do the function assigned to that button.
|
DANIEL F DIAZ BAYONA