|
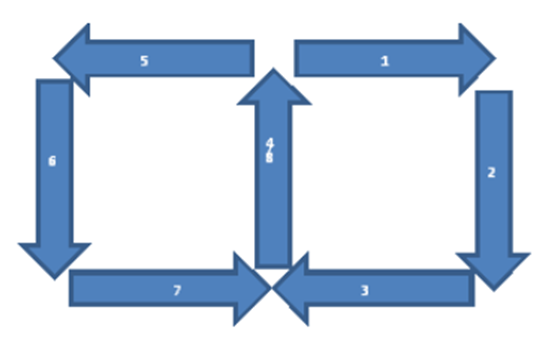
This project will meet the expectations for Objectives 3, 4 and 5 Wheel Encoders. ... Each wheel encoder is used to count the number of times the motor (left or right) has rotated. This can be used to calculate the distance that the robot has driven or turned. Each wheel encoder actually consists of two parts: a Hall Effect sensor that can measure the strength of a magnetic field. The encoder Motor lab is simple. During this lab we will encode the motors to make sure it does what we want them to do. In this case we want our Robotic car to the Figure 1 shown below. The programing of this encores will be making sure the car goes forward, then turn right or left respectively depending on the figure.
0 Comments
|
DANIEL F DIAZ BAYONA